discretize.operators.DiffOperators#

- class discretize.operators.DiffOperators[source]#
Class used for creating differential and averaging operators.
DiffOperatorsis a class for managing the construction of differential and averaging operators at the highest level. TheDiffOperatorclass is inherited by everydiscretizemesh class. In practice, differential and averaging operators are not constructed by creating instances ofDiffOperators. Instead, the operators are constructed (and sometimes stored) when called as a property of the mesh.Attributes
Averaging operator from cell centers to edges (scalar quantities).
Averaging operator from cell centers to faces (scalar quantities).
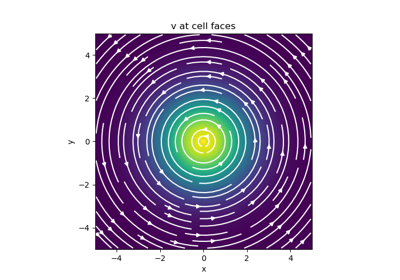
Averaging operator from cell centers to faces (vector quantities).
Averaging operator from edges to cell centers (scalar quantities).
Averaging operator from edges to cell centers (vector quantities).
Averaging operator from edges to faces.
Averaging operator from x-edges to cell centers (scalar quantities).
Averaging operator from y-edges to cell centers (scalar quantities).
Averaging operator from z-edges to cell centers (scalar quantities).
Averaging operator from faces to cell centers (scalar quantities).
Averaging operator from faces to cell centers (vector quantities).
Averaging operator from x-faces to cell centers (scalar quantities).
Averaging operator from y-faces to cell centers (scalar quantities).
Averaging operator from z-faces to cell centers (scalar quantities).
Averaging operator from nodes to cell centers (scalar quantities).
Averaging operator from nodes to edges (scalar quantities).
Averaging operator from nodes to faces (scalar quantities).
Integrate a vector function on the boundary.
Represent the operation of integrating a scalar function on the boundary.
Integrate a vector function dotted with the boundary normal.
cellGrad has been deprecated.
cellGradBC has been deprecated.
cellGradx has been deprecated.
cellGrady has been deprecated.
cellGradz has been deprecated.
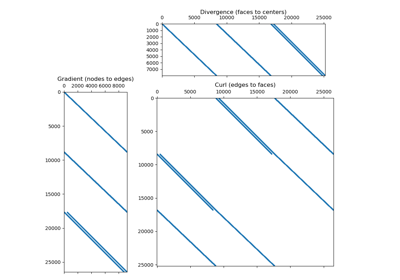
Cell gradient operator (cell centers to faces).
Boundary conditions matrix for the cell gradient operator (Deprecated).
X-derivative operator (cell centers to x-faces).
Y-derivative operator (cell centers to y-faces).
Z-derivative operator (cell centers to z-faces).
Edge curl operator (edges to faces).
faceDivx has been deprecated.
faceDivy has been deprecated.
faceDivz has been deprecated.
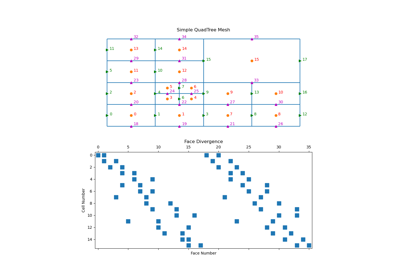
Face divergence operator (faces to cell-centres).
X-derivative operator (x-faces to cell-centres).
Y-derivative operator (y-faces to cell-centres).
Z-derivative operator (z-faces to cell-centres).
Nodal gradient operator (nodes to edges).
Nodal scalar Laplacian operator (nodes to nodes).
Projection matrix from all edges to boundary edges.
Projection matrix from all faces to boundary faces.
Projection matrix from all nodes to boundary nodes.
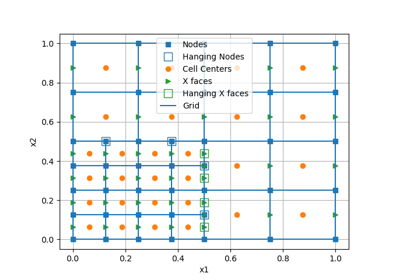
Stencil for cell gradient operator (cell centers to faces).
Differencing operator along x-direction (cell centers to x-faces).
Differencing operator along y-direction (cell centers to y-faces).
Differencing operator along z-direction (cell centers to z-faces).
Methods
cell_gradient_weak_form_robin([alpha, beta, ...])Create Robin conditions pieces for weak form of the cell gradient operator (cell centers to faces).
edge_divergence_weak_form_robin([alpha, ...])Create Robin conditions pieces for weak form of the edge divergence operator (edges to nodes).
getBCProjWF(*args, **kwargs)getBCProjWF has been removed.
getBCProjWF_simple(*args, **kwargs)getBCProjWF_simple has been removed.
get_BC_projections(BC[, discretization])Create the weak form boundary condition projection matrices.
get_BC_projections_simple([discretization])Create weak form boundary condition projection matrices for mixed boundary condition.
setCellGradBC(*args, **kwargs)setCellGradBC has been removed.
Set boundary conditions for derivative operators acting on cell-centered quantities.