discretize.base.BaseRegularMesh#

- class discretize.base.BaseRegularMesh(shape_cells, origin=None, orientation=None, reference_system=None, **kwargs)[source]#
Base Regular mesh class for the
discretizepackage.The
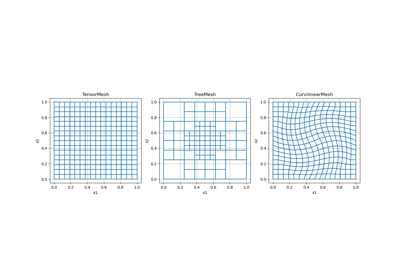
BaseRegularMeshclass does all the basic counting and organizing you wouldn’t want to do manually.BaseRegularMeshis a class that should always be inherited by meshes with a regular structure; e.g.TensorMesh,CylindricalMesh,TreeMeshorCurvilinearMesh.- Parameters:
- shape_cellsarray_like
ofint number of cells in each dimension
- originarray_like
offloat,optional origin of the bottom south west corner of the mesh, defaults to 0.
- orientation
discretize.utils.Identityor array_likeoffloat,optional Orientation of the three major axes of the mesh; defaults to
Identity. If provided, this must be an orthogonal matrix with the correct dimension.- reference_system{‘cartesian’, ‘cylindrical’, ‘spherical’}
Can also be a shorthand version of these, e.g. {‘car[t]’, ‘cy[l]’, ‘sph’}
- shape_cellsarray_like
Attributes
Orientation of the first axis.
Orientation of the second axis.
Orientation of the third axis.
The dimension of the mesh (1, 2, or 3).
Unit tangent vectors for all mesh edges.
Unit normal vectors for all mesh faces.
Total number of cells in the mesh.
Total number of edges in the mesh.
The number of edges in each direction.
Number of x-edges in the mesh.
Number of y-edges in the mesh.
Number of z-edges in the mesh.
Total number of faces in the mesh.
The number of faces in each axis direction.
Number of x-faces in the mesh.
Number of y-faces in the mesh.
Number of z-faces in the mesh.
Total number of nodes in the mesh.
Rotation matrix defining mesh axes relative to Cartesian.
Origin or 'anchor point' of the mesh.
Indicate whether mesh uses standard coordinate axes.
Coordinate reference system.
Alias for
orientation.Number of cells in each coordinate direction.
Alias for the
origin.