discretize.utils.inverse_3x3_block_diagonal#
- discretize.utils.inverse_3x3_block_diagonal(a11, a12, a13, a21, a22, a23, a31, a32, a33, return_matrix=True, **kwargs)[source]#
Invert a set of 3x3 matricies from vectors containing their elements.
- Parameters:
- a11, a12, …, a33(
n_blocks)numpy.ndarray Vectors which contain the corresponding element for all 3x3 matricies
- return_matrixbool,
optional True: Returns the sparse block 3x3 matrix M (default).
False: Returns the vectors containing the elements of each matrix’ inverse.
- a11, a12, …, a33(
- Returns:
- (3 *
n_blocks, 3 *n_blocks)scipy.sparse.coo_matrixorlistof(n_blocks) numpy.ndarray. If return_matrix = False, the function will return vectors b11, b12, b13, b21, b22, b23, b31, b32, b33. If return_matrix = True, the function will return the block matrix M.
- (3 *
Notes
The elements of a 3x3 matrix A are given by:
\[\begin{split}A = \begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix}\end{split}\]For a set of 3x3 matricies, the elements may be stored in a set of 9 distinct vectors \(\mathbf{a_{11}}\), \(\mathbf{a_{12}}\), …, \(\mathbf{a_{33}}\). For each matrix, inverse_3x3_block_diagonal ouputs the vectors containing the elements of each matrix’ inverse; i.e. \(\mathbf{b_{11}}\), \(\mathbf{b_{12}}\), …, \(\mathbf{b_{33}}\) where:
\[\begin{split}A^{-1} = B = \begin{bmatrix} b_{11} & b_{12} & b_{13} \\ b_{21} & b_{22} & b_{23} \\ b_{31} & b_{32} & b_{33} \end{bmatrix}\end{split}\]For special applications, we may want to output the elements of the inverses of the matricies as a 3x3 block matrix of the form:
\[\begin{split}M = \begin{bmatrix} D_{11} & D_{12} & D_{13} \\ D_{21} & D_{22} & D_{23} \\ D_{31} & D_{32} & D_{33} \end{bmatrix}\end{split}\]where \(D_{ij}\) are diagonal matrices whose non-zero elements are defined by vector \(\\mathbf{b_{ij}}\). Where n is the number of matricies, the block matrix is sparse with dimensions (3n, 3n).
Examples
Here, we define four 3x3 matricies and reorganize their elements into 9 vectors a11, a12, …, a33. We then examine the outputs of the function inverse_3x3_block_diagonal when the argument return_matrix is set to both True and False.
>>> from discretize.utils import inverse_3x3_block_diagonal >>> import numpy as np >>> import scipy as sp >>> import matplotlib.pyplot as plt
Define four 3x3 matricies, and organize their elements into nine vectors
>>> A1 = np.random.uniform(1, 10, (3, 3)) >>> A2 = np.random.uniform(1, 10, (3, 3)) >>> A3 = np.random.uniform(1, 10, (3, 3)) >>> A4 = np.random.uniform(1, 10, (3, 3)) >>> [[a11, a12, a13], [a21, a22, a23], [a31, a32, a33]] = np.stack( ... [A1, A2, A3, A4], axis=-1 ... )
Return the elements of their inverse and validate
>>> b11, b12, b13, b21, b22, b23, b31, b32, b33 = inverse_3x3_block_diagonal( ... a11, a12, a13, a21, a22, a23, a31, a32, a33, return_matrix=False ... ) >>> Bs = np.stack([[b11, b12, b13],[b21, b22, b23],[b31, b32, b33]]) >>> B1, B2, B3, B4 = Bs.transpose((2, 0, 1))
>>> np.linalg.inv(A1) array([[ 0.20941584, 0.18477151, -0.22637147], [-0.06420656, -0.34949639, 0.29216461], [-0.14226339, 0.11160555, 0.0907583 ]]) >>> B1 array([[ 0.20941584, 0.18477151, -0.22637147], [-0.06420656, -0.34949639, 0.29216461], [-0.14226339, 0.11160555, 0.0907583 ]])
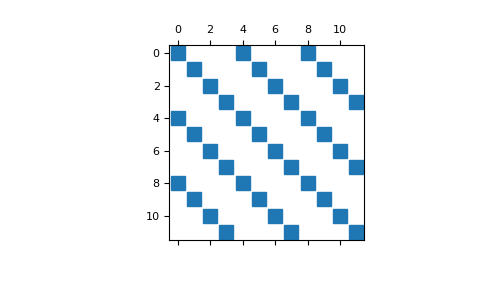
We can also return this as a sparse matrix with block diagonal inverse
>>> M = inverse_3x3_block_diagonal( ... a11, a12, a13, a21, a22, a23, a31, a32, a33 ... ) >>> plt.spy(M) >>> plt.show()
(
Source code,png,pdf)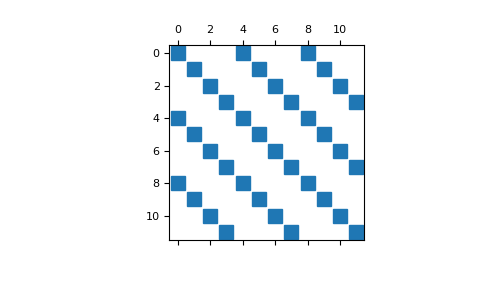
{kind=link}